未来環境ラボの中口です。未来環境ラボには、ホビードローンの一つ、Parrot Mamboが置いてあります(ラボメンバーであればいつでも使えます!)。今回はこのParrot MamboをAndroidからコントロールするためのSDKをビルドする方法を紹介します。使用するPCはMacを想定していますが、Windowsでも同じ様にビルドできるはずです。
Parrot Mambo
いわゆるホビードローンと呼ばれているもので、200g未満の、飛行許可申請のいらないドローンです。申請がいらないと言っても、重要施設の周辺や公園など、飛行が禁止されている場所も多いこと、そもそも軽いので風邪に弱いことから、屋内で飛ばすのが良いです。未来環境ラボにあるのは、Parrot Mambo Missionという、Mamboにキャノン砲やアームが付属したモデルに、さらにFPVのパーツ、前方カメラとスマホ用ゴーグルも加えたものです。
Parrot Drone SDK
このParrot Mamboや、Parrot社が発売している他のドローンを制御するためのSDKやサンプルが、GitHubで公開されています。Android用とiOS用があり、さらにはドローン内部で使用されているソフトウェアも公開されています。今回はAndroid用のサンプルを実際に動作させてみましょう。
Android Studioのインストール
Android用サンプルを利用するには、Android Studioが必要です。ダウンロードしてインストールしておきましょう。
サンプルのClone
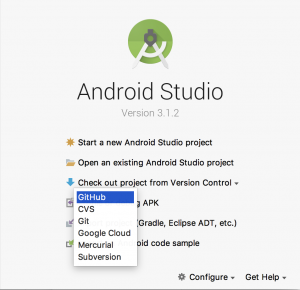
Android Studioを起動して、GitHubからソースをcloneしましょう。まず起動画面で、[Check out project from Version Control] → [GitHub] と選びます。
Android Studioで初めてGitHubからクローンする場合、ユーザ設定などが出てくるので、アカウントを持っている人は入力します。その後リポジトリのURLなどを聞かれます。
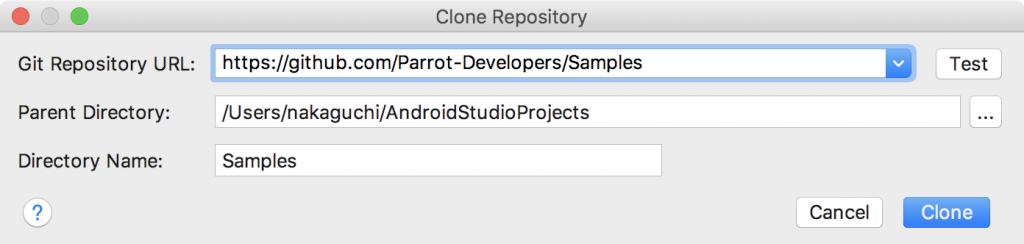
リポジトリのURLとして,
- https://github.com/Parrot-Developers/Samples
を入力して、[Clone]をクリックします。
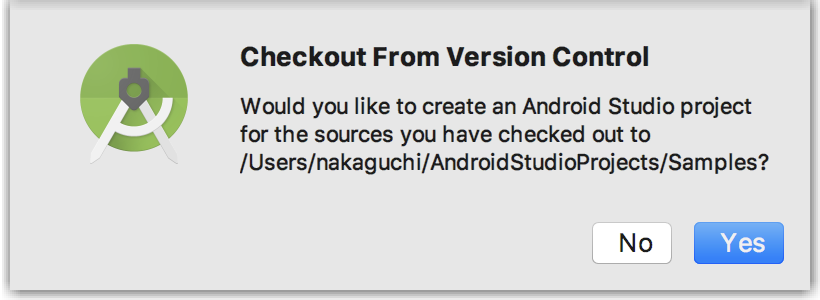
もう一度チェックアウトするかを聞かれるので[Yes]を選びます。
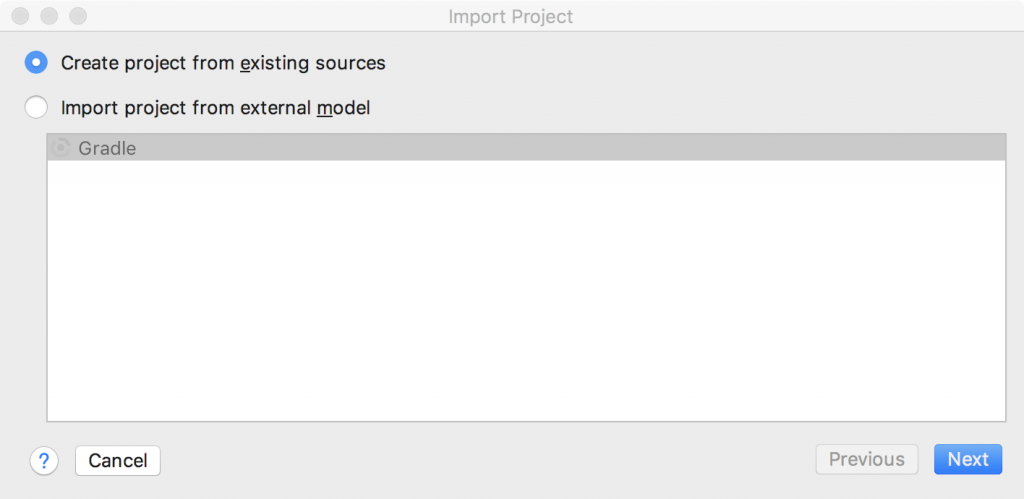
次にプロジェクトを作成するかインポートするかを聞かれるので、[Create project from existing sources]を選びます。この後プロジェクト名などを聞かれますが、[Next]を選び続けます。4〜5回[Next]を選ぶとIDEが表示されます。
サンプルのビルドと実行
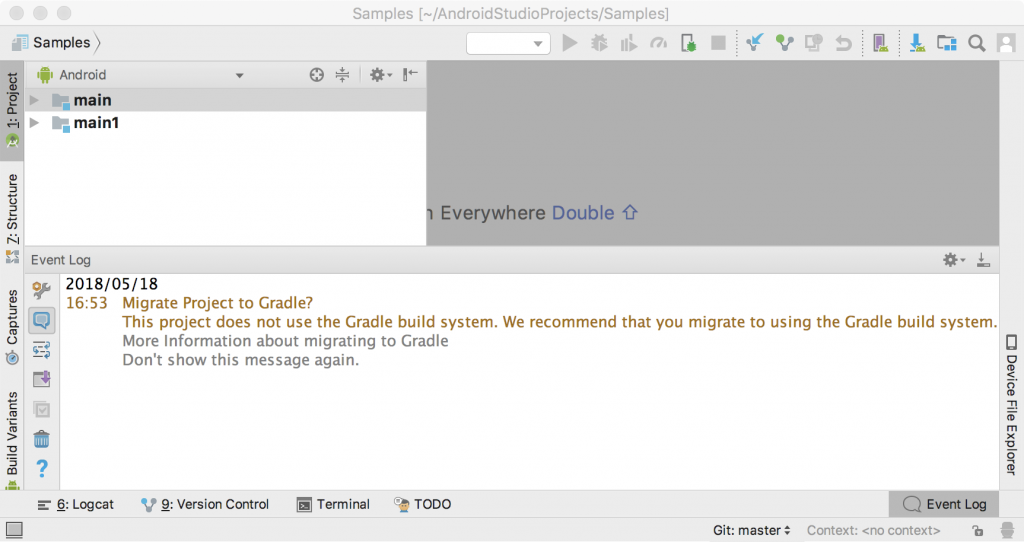
この画面になったら、一旦ターミナルを開き、次のコマンドを入力します。
cd ~/AndroidStudioProjects/Samples/Android/SDKSample/buildWithPrecompiledSDK/ ANDROID_HOME=/Applications/android-sdk/ ./gradlew
これでSDKのビルドが行われます。環境変数ANDROID_HOMEには、Android SDKの位置を指定します。/Applications/android-sdk以外の場所にインストールしている場合は、適切に値を変更して下さい。また、既にANDROID_HOMEが設定されている場合は、./gradlewだけでもOKです。
しばらくすると、ビルドが完了します。
次にAndroid Studioに戻り、メニューから[File]→[Open]とクリックし、SamplesのAndroid/SDKSample/buildWithPrecompiledSDK/settings.gradleを選択し、[Open]をクリックします。
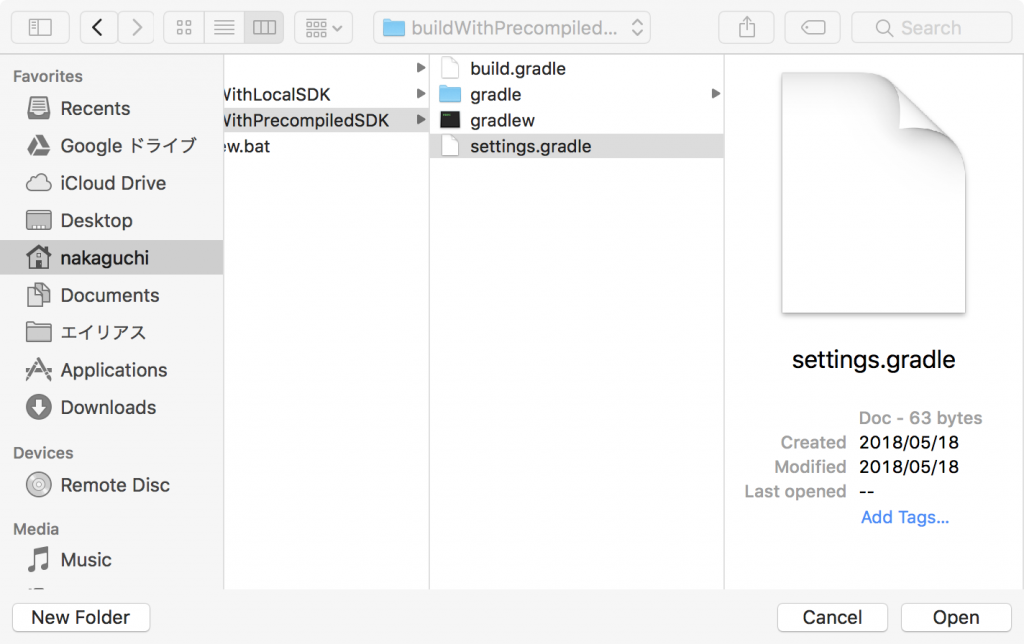
新たにウィンドウを開くかを聞いてくるので、[This Window]を選びましょう。その後IDEが再度表示されます。
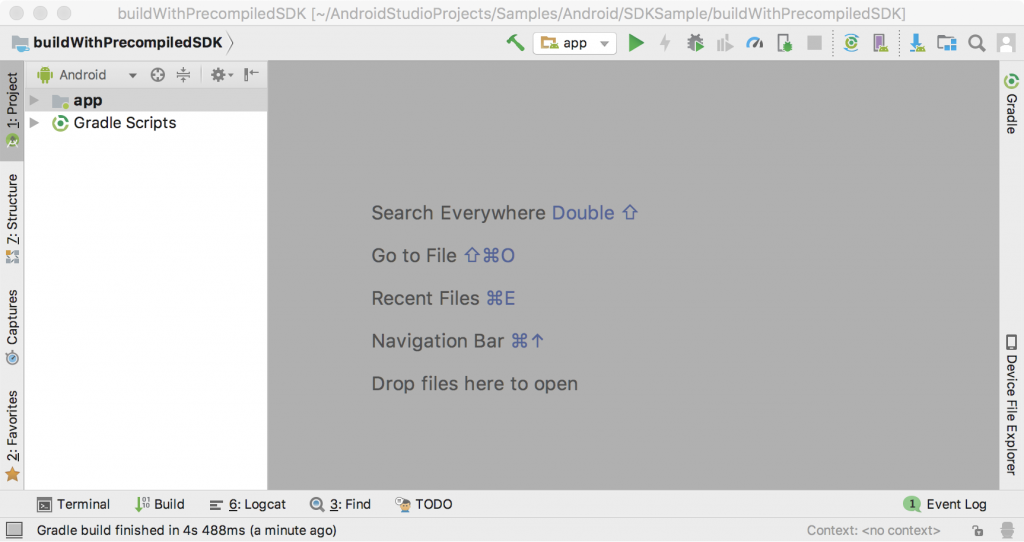
この状態で、次の手順でサンプルを実行できます。
- スマホをMacに接続する。
- FPVカメラを接続したMamboの電源を入れる。
- スマホでWiFi設定を開き、Mambo_XXXXXX(Xは数字)に接続する。
- Android Studioの実行ボタン(緑の再生ボタン)をクリック。
以上の手順でサンプルアプリが起動し、うまくいけば次のような画面が表示されます。
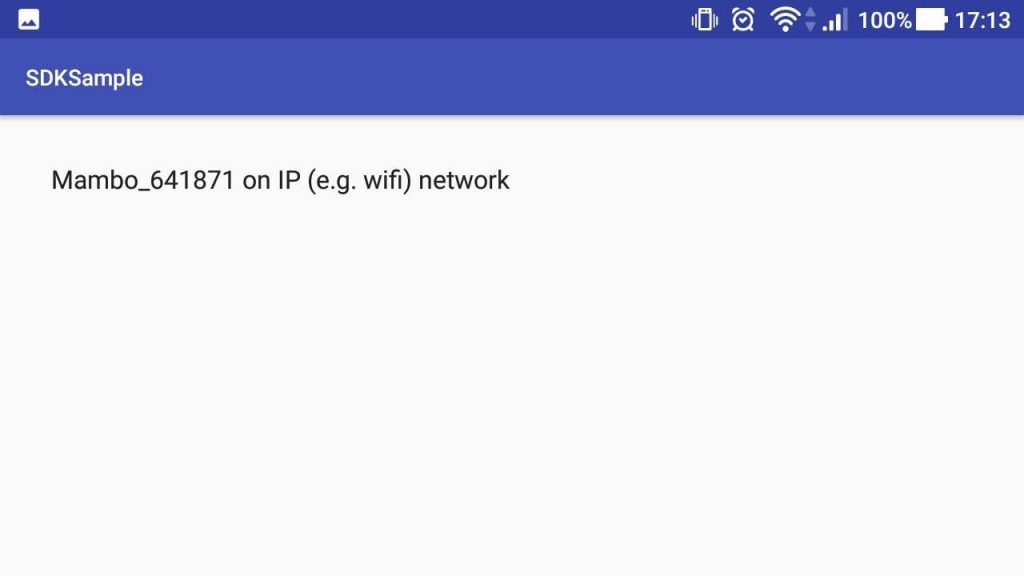
上記の”Mambo_・・・”と表示されているところをクリックすると、次のような画面が表示されます。
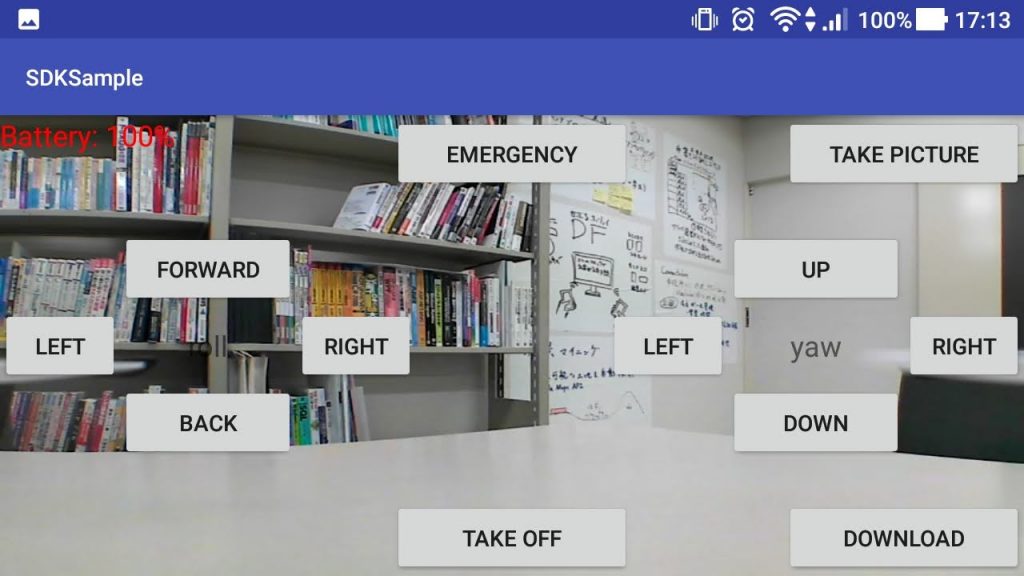
公式のアプリよりはだいぶ見た目が簡素ですが、ソースコード付きなので、自由に改変できます。一通りの操作もできるので、頑張れば自動操縦できるかも?興味を持ったKCG生、KCGI生は、是非ラボに遊びに来て下さい。