 MDDロボットチャレンジから帰ってきました。昨日にはモデルワークショップがありました。モデルと飛行競技の成績の相関を表したのが,図です。得点の順位の相関ですので,原点に近いほど得点は高いことを表しています。
MDDロボットチャレンジから帰ってきました。昨日にはモデルワークショップがありました。モデルと飛行競技の成績の相関を表したのが,図です。得点の順位の相関ですので,原点に近いほど得点は高いことを表しています。
さて京魂英雄ですが,飛行競技は13位,モデルは昨年並の6位でしたので,この図で言えば「学者」と書かれた領域の近くになります。逆に,モデル得点が低く,飛行競技が高得点になると,「職人」になります。京魂英雄チームは,飛行しなかったので,学者に近いことになります。とても悔しいです。
さて,モデル得点をこれ以上稼ごうと思うと,以下のものにチャレンジする必要があるようです。
・PID制御などの物理制御
・非機能要件
・SysML (eUML関連のモデリング)
とりあえず,今年はやるべきことはすべてやったという感じです。
・上下方向のモーターを強力なものに変更する実験
・室温上昇時の浮力の影響の計算
・ドリトルv2へのコードの書き直し
・ドリトル使用時のUML図の解釈の見直し
・USB RS232C変換ケーブルのメーカーごとの検討…実はこれに時間がかかりましたが。
・地上局の位置検出(xy方向)のソフトウェアの制作
・xy方向の位置検出ファイルのドリトルへの読み込み
これだけやったので悔いはありませんね。では,MDD2010に参加したい方は11月祭にお越しください。
【参考】
MDDロボットチャレンジ2009
PID制御って何?
非機能要件を見極める【前編】 – 上流工程-要件定義:ITpro
非機能要件を見極める【後編】 – 上流工程-要件定義:ITpro
[Think IT] 第2回:SysMLとは何か (1/3)
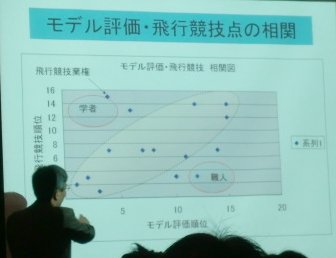
図 京魂英雄は学者タイプ?